Systems Engineering · Software for Mechatronics · Reinforcement Learning
Moving towards dependable, human-centred autonomous systems.
First-Class Master of Engineering (International): Cardiff University with a KAIST exchange. I’m an aspiring mechatronics engineer focused on physics-based modelling & simulation with hardware-integrated ROS deployments.
- ROS (Noetic)
- Python
- C++
- RTAB-Map
- PPO
- State-space & digital control
- Sustainability
- Continuous Improvement
- Teamwork & Communication
Featured projects
The Design and Evaluation of Haptic Feedback Methods and Environmental Impacts on a Wearable Navigation System
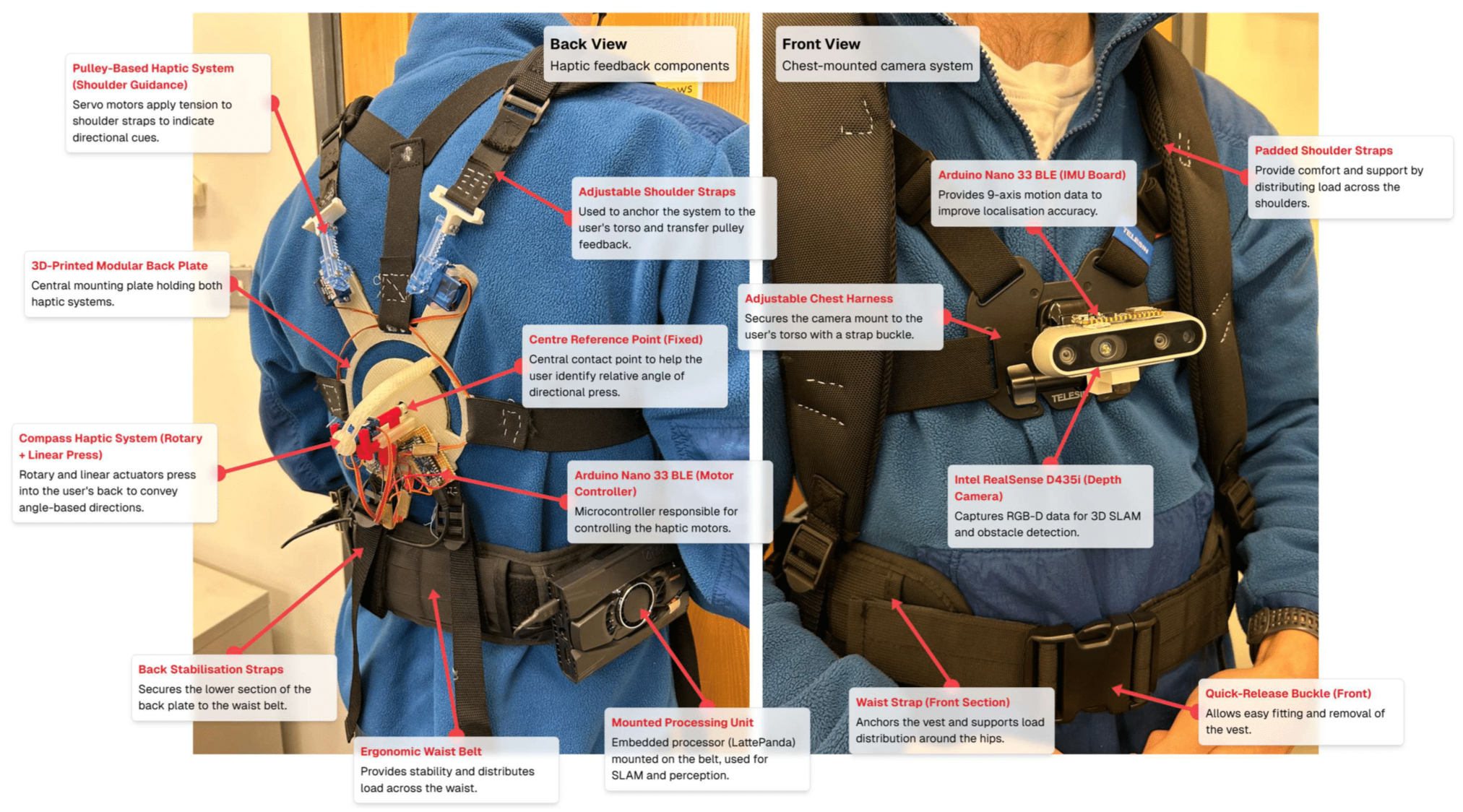
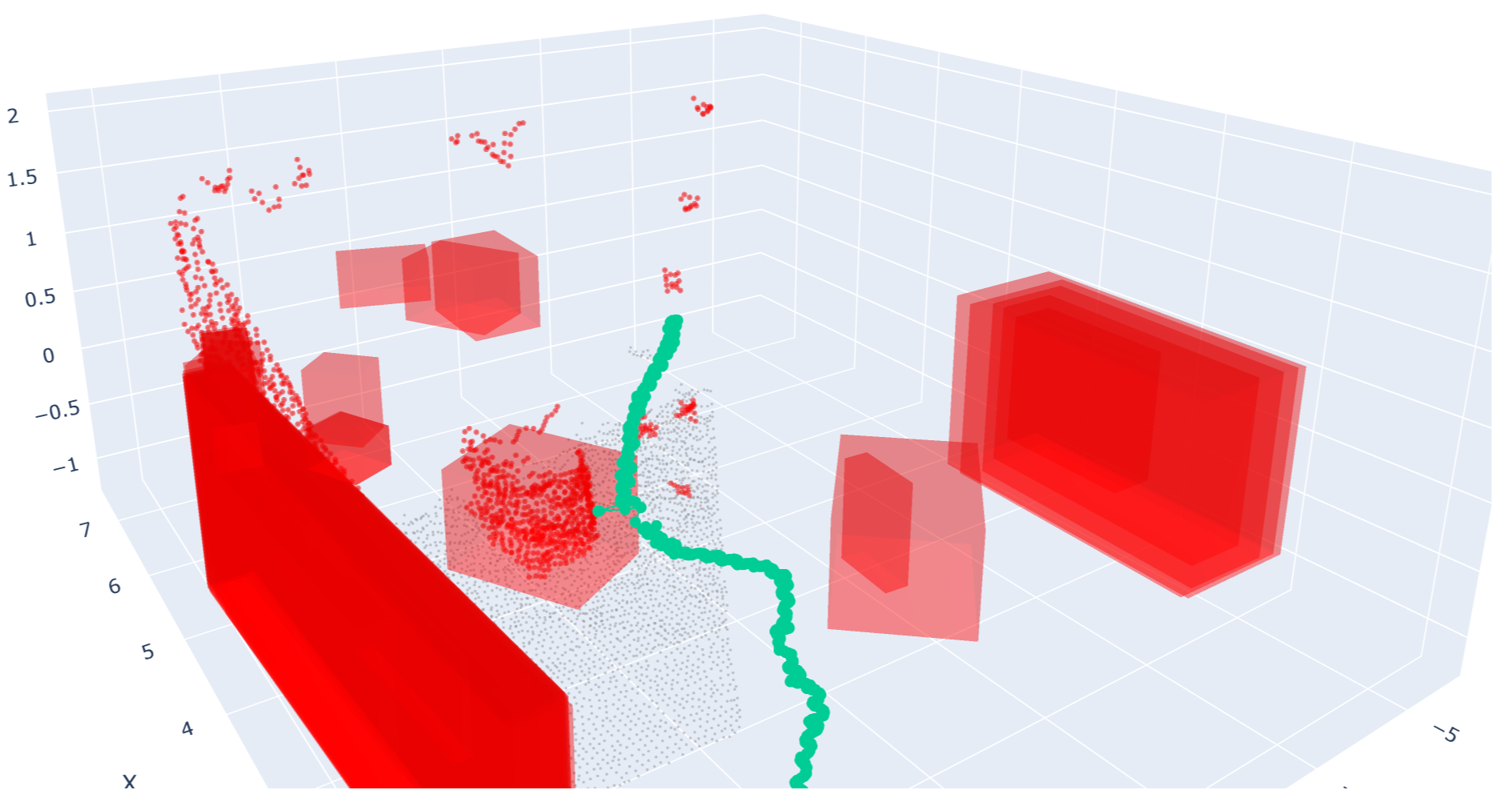
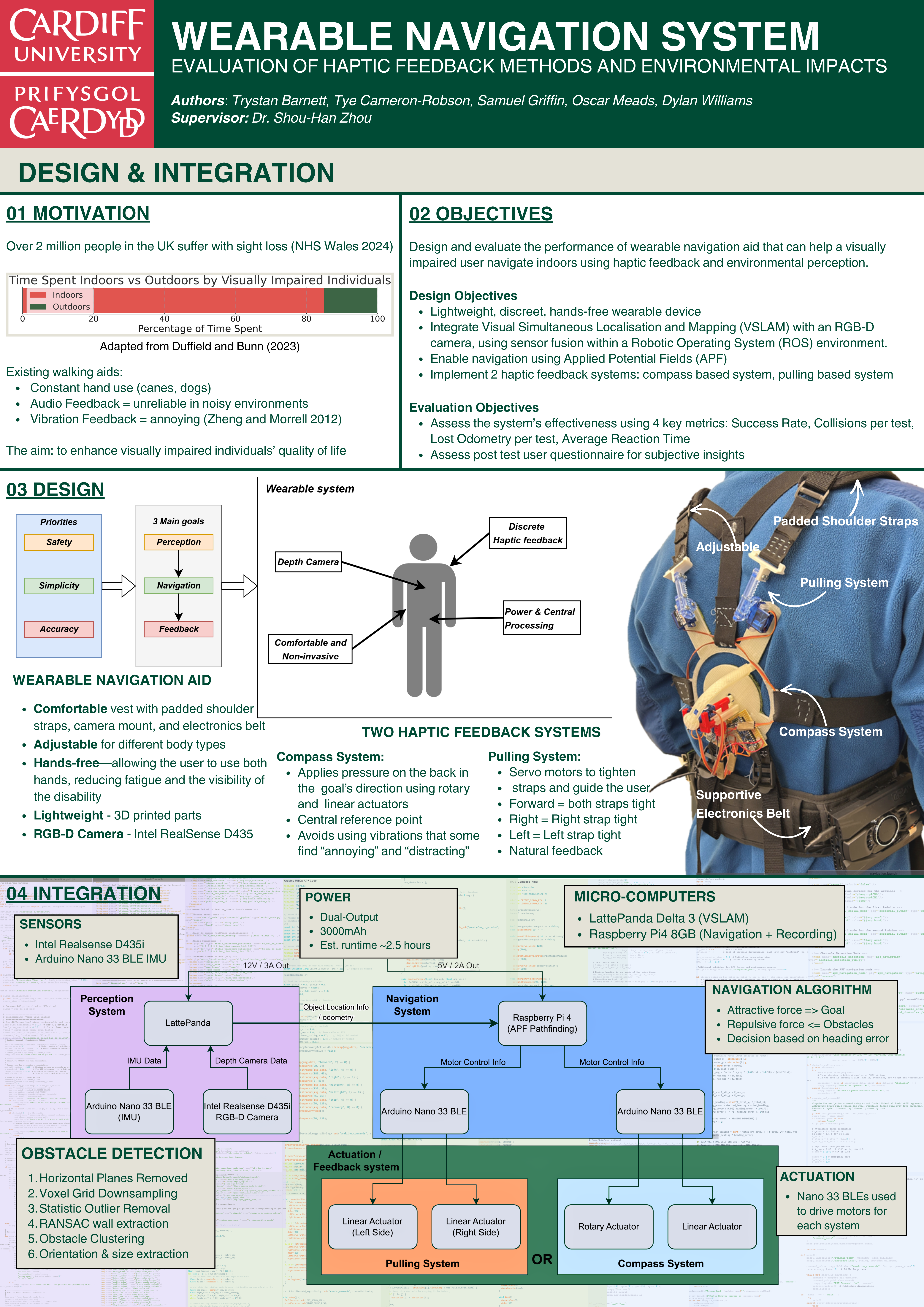
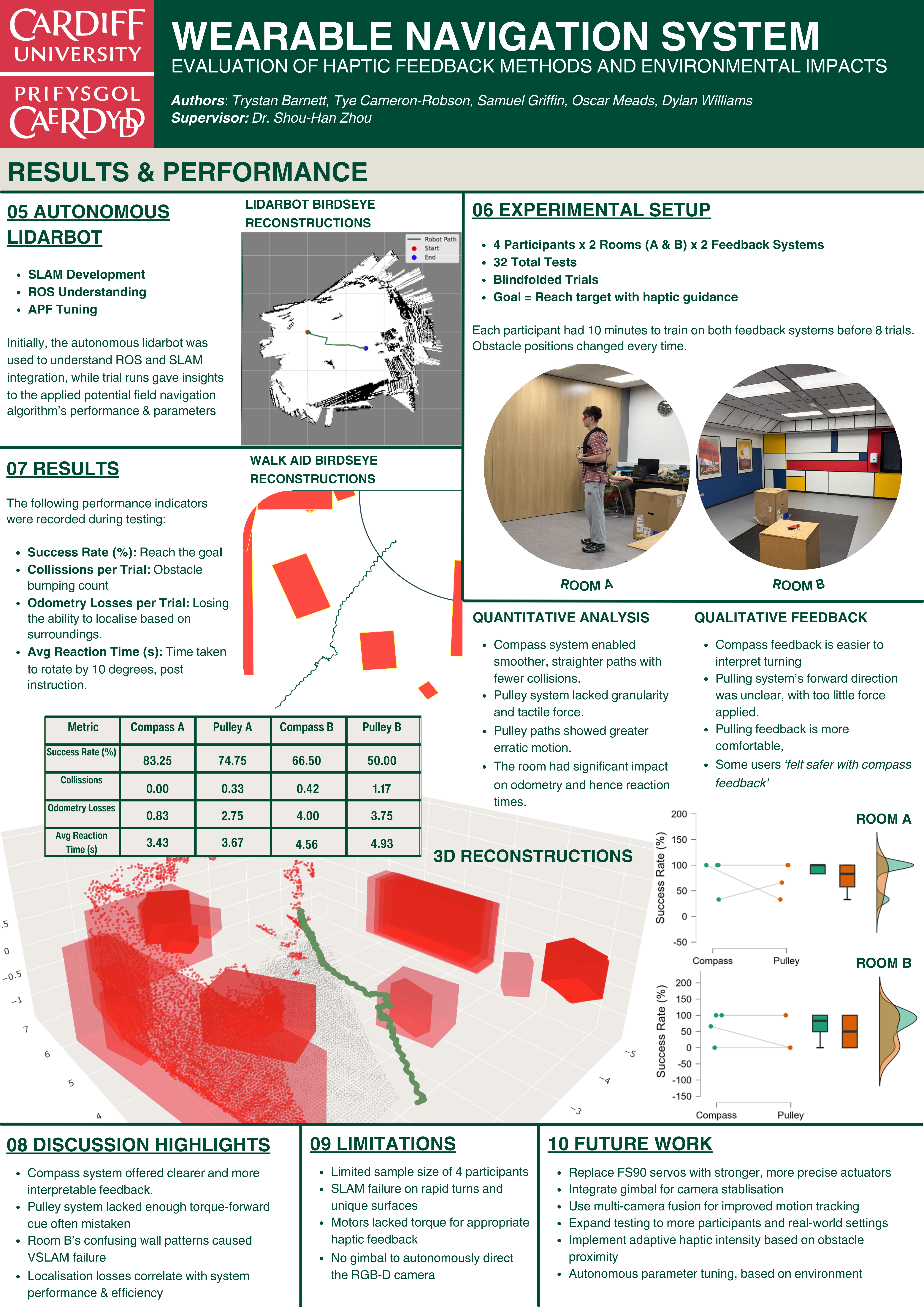

Built a wearable navigation system (RGB-D VSLAM, APF navigation, haptic actuation) with EEG event logging. Trials showed fixed reference haptic cues outperformed rotational haptic ques on success, safety, and reaction time.
Reinforcement Learning-Based Control of a Quadruped Agent in a Simulated Sumo Arena
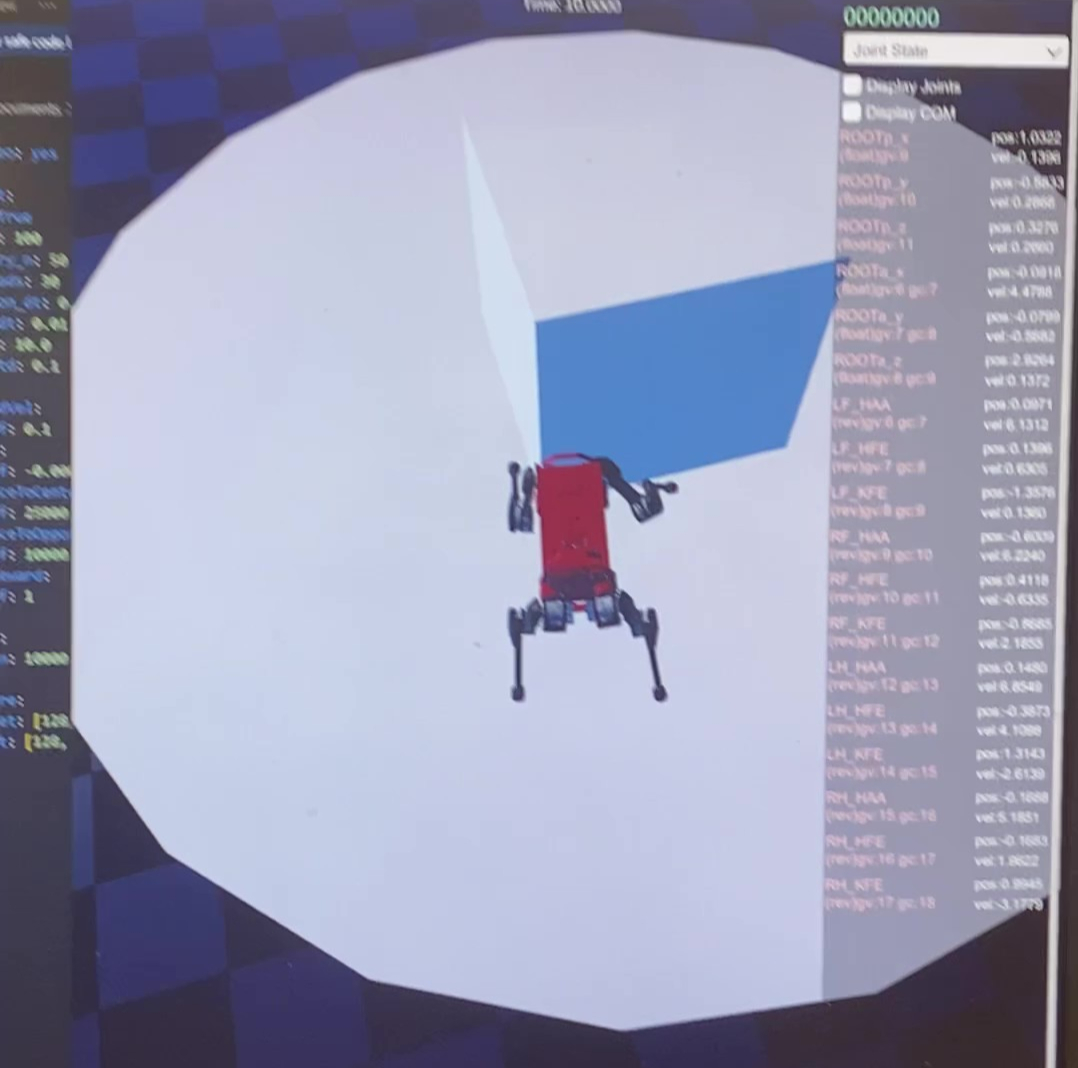
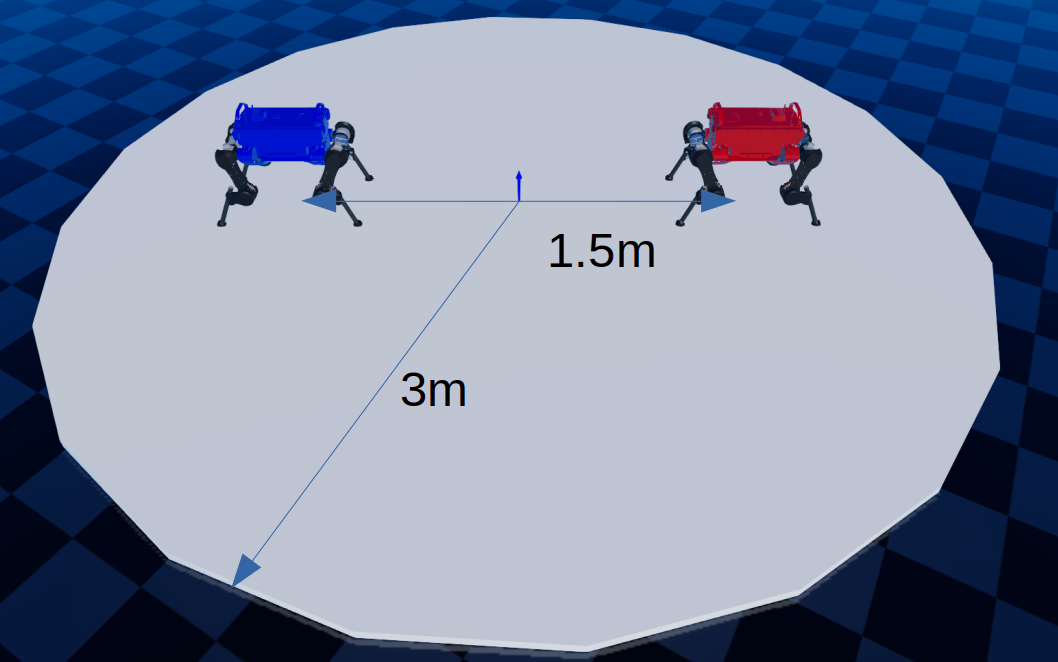
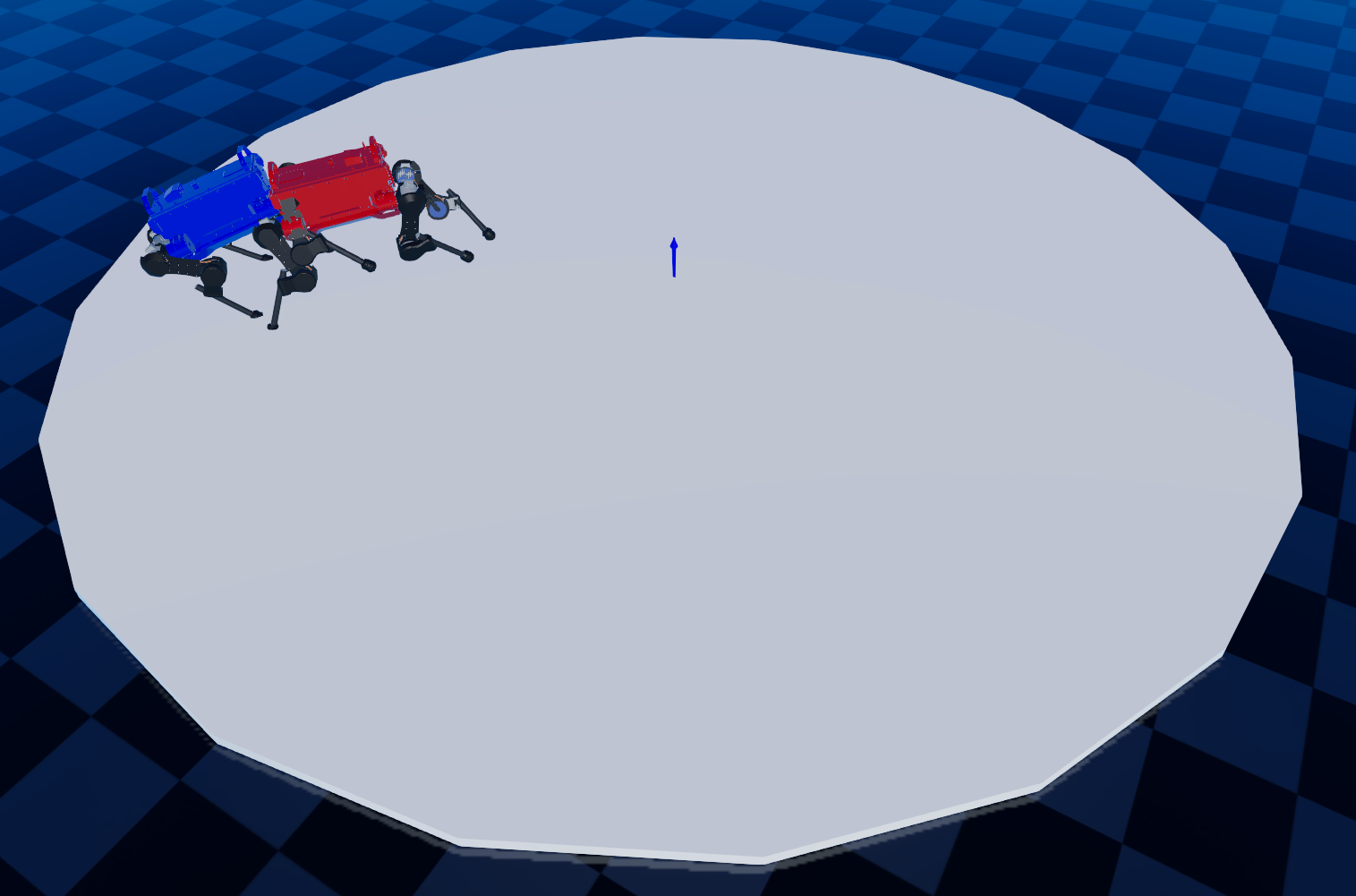
Trained full ANYmal with joint-torque control and a two-stage curriculum; analysed learning curves, hyperparameters, and emergent tactics under adversarial contact.